
多线程编程
多线程编程
1.线程的基本概念
线程是进程中(独立的)一条执行流程(通常就是个函数),它是CPU调度的基本单位。
同一个进程内多个线程之间可以共享代码段、数据段、打开的文件等资源,但每个线程各自都有一套独立的寄存器和栈,这样可以确保线程的控制流是相对独立的。
2.线程的实现
==关于内核线程和用户线程,看b站之前看的那个视频==
根据线程的运行环境和调度者的身份,可以将线程分为:用户线程和内核线程
- 用户线程:在用户态被创建,由线程库来进行调度
- 内核线程:在内核态被创建,由操作系统内核进行调度
同一个进程可以同时拥有M个内核线程和N个用户线程,根据M:N的大小,可以将线程的实现分成3种方式。
只有内核线程才能从操作系统拿到独立的CPU核心资源
2.1完全在用户空间实现
此时N个用户线程全部映射到一个内核线程上,这N个线程之间的创建和调度有线程库来进行。但内核根本不知道这N个用户线程的存在,故此时N个用户线程被内核当成一个线程来与其他进程的线程进行调度,和分配资源,最多同时拥有一个CPU核心,因此无法做到真正的并行执行,只能各个任务串行执行,就像FreeRTOS一样。
2.2完全在内核空间实现
此时每个用户线程都映射到一个内核线程上,线程的创建和调度都交给系统内核来进行,由于有N个内核线程,这N个用户线程都有可能拿到独立的CPU核心,因此可以实现真真的并行执行。
之前的多线程编程中,用
Qt时,重写的run()应该算是一个内核线程
2.3进程的调度
线程是CPU调度的基本单位,但教课书上一般都叫进程调度(这里把各进程看成只有一个线程的进程),因此我们也叫进程调度算了
2.3.0进程调度的概念
进程调度程序,简称进程调度,它是内核的一部分,该程序负责控制将哪个进程放到CPU上运行,何时运行以及运行多长时间
2.3.1调度算法的分类
多任务操作系统是指能同时并发执行多个进程的操作系统。
多任务系统的调度算法分为两类:非抢占式多任务(cooperative multitasking)和抢占式多任务(preemptive multitasking)
- ==非抢占式==是一种协作的方式,一个进程一直执行,直到任务结束或者主动进入阻塞态(I/O操作、信号量、互斥锁…),才切换到下一个进程
- ==抢占式==是大部分操作系统采用的方式,一个进程在运行态,并未进入阻塞态或结束时,操作系统可以强行打断该进程而切换到另一个进程。比如时间片轮转法中,给每个进程分配一个时间片,当时运行时间达到规定的时间时则会切换到下一个进程。
2.3.2调度的准则
调度程序不是随便调度的,它会以某些准则来决定一下个被调度的程序是哪个。以下是一些常见的5条准则:
- CPU 利用率:调度程序应确保 CPU 是始终匆忙的状态,这可提高 CPU 的利用率;
- 系统吞吐量:吞吐量表示的是单位时间内 CPU 完成进程的数量,长作业的进程会占用较长的 CPU 资源,因此会降低吞吐量,相反,短作业的进程会提升系统吞吐量;
- 周转时间:周转时间是进程运行+阻塞时间+等待时间的总和,一个进程的周转时间越小越好;
- 等待时间:这个等待时间不是阻塞状态的时间,而是进程处于就绪队列的时间,等待的时间越长,用户越不满意;
- 响应时间:用户提交请求到系统第一次产生响应所花费的时间,在交互式系统中,响应时间是衡量调度算法好坏的主要标准。
通常为了遵循以上准则,操作系统优先调度I/O密集型任务,而不是计算密集型任务
2.3.3进程优先级
很多进程调度算法都是依据优先级来决定如何进行进程调度的,根据操作系统所使用的进程调度算法属于抢占式还是非抢占式,可以把优先级分为实时优先级和普通优先级。
2.3.4Linux操作系统使用的调度算法
Linux调度器是以分类的方式提供的,即对不同类型的进程进行分组并且==分别选择相应的算法==。
如下图Linux调度器包含了多种调度器类。
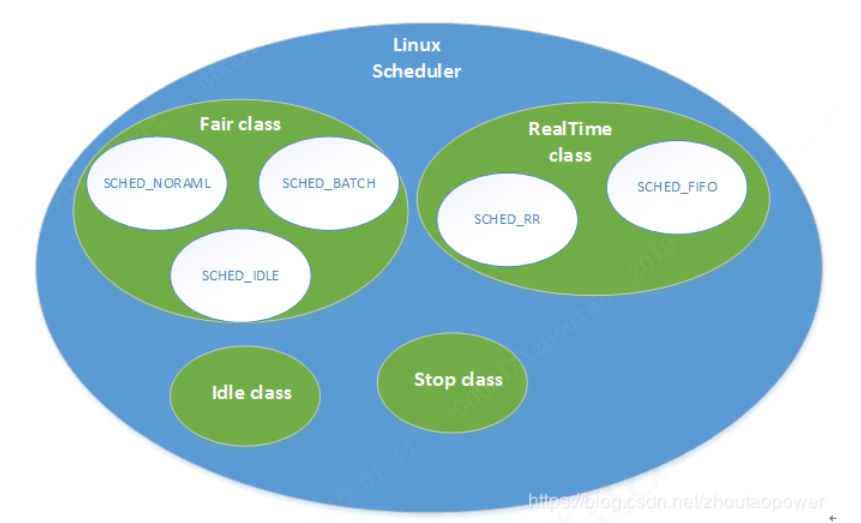
这些调度器类的优先级顺序为: Stop_Task > Real_Time > Fair > Idle_Task。
开发者可以根据己的设计需求把所属的Task配置到不同的scheduler classes中。其中的Real_Time和Fair是最常用的,也对应了我们上面提到的实时进程和普通进程。
(1)完全公平调度算法(Completely Fair Scheduler,CFS):==非抢占式==
上图中的Fair Class即普通任务采用完全公平调度算法(Completely Fair Scheduler,CFS)。
这是一个针对普通进程的调度类,在Linux中称为SCHED_NORMAL(在POSIX中称为SCHED_OTHER)。
传统的时间片方式是每个进程固定一个时间,那么当进程个数变化时,整个调度周期顺延。时间片还会跟着系统定时器节拍随时改变,那么整个周期再次跟着变化。那么优先级低的进程可能迟迟得不到调度。
而CFS把整个调度周期的时间固定,该周期叫目标延迟(target latency),也不再采用时间片,而是根据每个进程的优先级得到的权重再计算得到处理器比例,进而得到进程自己的时间。该时间和节拍没有任何关系,也可以精确到ns。例如“目标延迟”设置为20ms,2个进程各10毫秒,如果4个进程则是各5毫秒。如果100个进程呢,是不是就是0.2毫秒呢?
不一定,CFS引入了一个关键特性:最小粒度。即每个进程获得时间片的最小值,默认是1毫秒。
为了公平起见,CFS总是选择运行最少(vruntime)的进程作为下一个运行进程。所以这样照顾了I/O消耗型短时间处理的需求,也将更多时间留给了CPU消耗型的程序。确实解决了多进程环境下因延迟带来的不公平性。
(2)实时调度策略
实时调度策略包括两种调度算法:SCHED_FIFO 和 SCHED_RR。
这两种实时进程都比任何普通进程的优先级更高(SCHED_NORMAL),都会比他们更先得到调度。
SCHED_FIFO:==非抢占式==
一个这种类型的进程处于可执行的状态,就会一直执行,直到它自己被阻塞或者主动放弃 CPU;它不基于时间片,可以一直执行下去,只有更高优先级的SCHED_FIFO或者SCHED_RR才能抢占它的任务,如果有两个同样优先级的SCHED_FIFO任务,它们会轮流执行,其他低优先级的只有等它们变为不可执行状态,才有机会执行。
SCHED_RR:==抢占式==
与SCHED_FIFO大致相同,只是SCHED_RR级的进程在耗尽事先分配给它的时间后就不能再执行了。所以SCHED_RR是带有时间片的SCHED_FIFO:一种实时轮流调度(Realtime Robin)算法。
上述两种实时算法实现的都是静态优先级。内核不为实时进程计算动态优先级,保证给定的优先级的实时进程总能够抢占比他优先级低的进程。
2.3.5Windows操作系统使用的调度算法
Windows内核的调度算法采用的是抢占式的多级反馈队列轮转法,该算法和FreeRTOS的任务调度算法类似,该进程调度算法不是基于时间片的,每次调度时,从就绪队列中取出优先级最高的任务进行调度。
在 Windows 中,每个进程都被分配一个初始优先级,并且系统会根据一定的规则来动态地调整进程的优先级。
通过抢占式调度算法,Windows 操作系统能够提供更好的响应性和公平性。当有新的进程需要执行或者已有进程的优先级发生变化时,操作系统可以迅速中断正在运行的进程,并将 CPU 分配给更紧急或更重要的任务。
非抢占式和抢占式:
- 非抢占式:当就绪队列中出现优先级高的进程,运行完当前进程,再选择优先级高的进程。
- 抢占式:当就绪队列中出现优先级高的进程,当前进程挂起,调度优先级高的进程运行。
但是依然有缺点,可能会导致低优先级的进程永远不会运行。
通过这里我们可以了解,如果某进程一直不被调度,那么跟操作系统使用的调度算法是不是抢占式的根本没关系,跟该进程的任务优先级才有关系。
2.3.6什么时候会发生进程的调度
在进程的生命周期中,当进程从一个运行状态到另外一状态变化的时候,会触发一次调度。
比如,以下状态的变化都会触发操作系统的调度:
- 从就绪态 -> 运行态:当进程被创建时,会进入到就绪队列,操作系统会从就绪队列选择一个进程运行;
- 从运行态 -> 阻塞态:当进程发生 I/O 事件而阻塞时,操作系统必须选择另外一个进程运行;
- 从运行态 -> 结束态:当进程退出结束后,操作系统得从就绪队列选择另外一个进程运行;
因为,这些状态变化的时候,操作系统需要考虑是否要让新的进程给 CPU 运行,或者是否让当前进程从 CPU 上退出来而换另一个进程运行。
3.线程的所有权
在写多线程的代码时,创建线程时需要指定线程所有权,来管理线程的==生命周期==和==行为状态==:
.join():将线程的所有权转移给调用线程(创建该线程的线程)。执行该函数后,调用线程会阻塞等待被调用线程的结束,并在结束后对其进行资源回收。从线程同步的视角来看,这个函数也算一种线程同步方式:主线程等待子线程执行完毕。.detach():将新创建的线程与父线程分离,使其所有权交还给操作系统,使得该线程在后台继续执行,而不会影响到主线程的执行。此时被调用线程的线程对象和线程执行的资源都由操作系统管理。
4.线程同步
多线程和多进程都需要考虑同步问题,虽然上面的
.join()能通过阻塞等待来实现父子线程的同步,但它解决不了一些复杂的问题,比如:控制各个线程对共享资源的独占式访问、在满足某个条件时唤醒某线程、控制资源的访问数量、控制各个线程执行的先后执行顺序….这就需要下面的同步方法来完成了。
4.1信号量
信号量主要用于控制资源的访问数量。可以设置一个初始值,表示可用的资源数量,每个线程在访问资源之前需要获取信号量,如果信号量大于0,则减少信号量的值并继续执行;如果信号量等于0,则线程需要等待,直到有其他线程释放资源使信号量增加。
信号量类通常含有以下的成员方法,或者说信号量一般有以下功能:
wait():尝试获取信号量,如果信号量大于1个,则将信号量的数量减1然后接着执行后边的代码;如果信号量数量为0,则该线程阻塞,直到别的线程又释放信号量了post():释放信号量,会使信号量的数量加1,如果此时某个线程因为wait()被阻塞,那么此线程接下来会被唤醒
4.2互斥锁
互斥锁(互斥量)一般用于保护重要的共享资源,确保各线程对该资源的独占式访问,与二进制信号量类似
互斥锁一般包含以下成员方法:
lock():尝试给某互斥锁加锁,如果该互斥锁已被锁上,那么该线程阻塞等待,直到该锁在别的线程被解锁unlock():给某互斥锁解锁,如果其他某个线程正因该锁处于阻塞态,那么该线程接下来会被唤醒
4.3条件变量
条件变量提供了一种线程间的通信机制,某些线程会因为 ”等待某个条件达成“ 而进入阻塞,另一种线程用于发出通知,告诉其他线程 ”条件已达成“ ,并唤醒那些正被阻塞的线程。条件变量一般需要和互斥锁一起使用。
举个例子,就是当时连接RTSP相机的时候,OpenCV那个打开相机的函数,如果打开失败的话需要几十秒才会返回,为了在主线程中加入连接超时(5s左右)报错的功能,就创了个子线程来连相机,并在主线程中调用
wait_for()来等待条件变量,子线程中在打开相机那个函数结束后会notify_one(),但主线程的wait_for()只阻塞等5s,超过了就直接往下执行了。如果没收到这个条件变量,就直接报错:相机连接失败。
条件变量一般包含以下成员方法:
wait():阻塞等待目标条件变量,只有满足某些条件才会接着往下执行notify_all():以广播的形式唤醒所有等待目标条件变量的线程notify_one():唤醒一个等待目标条件变量的线程,具体唤醒哪个由调度算法决定
5.线程安全问题
线程的安全问题即对共享资源的同时访问的问题,详见上一章的线程同步
6.线程的数量
有的时候我们可能有疑问,什么时候需要用多线程,多线程的数量是不是越多越好呢?
对于I/O密集型的任务和计算密集型的任务,多线程的最佳数量是有区别的!
- I/O密集型任务:线程数量可以“无限”增多,因为大量线程都因为I/O操作而阻塞,CPU只会在个别没被阻塞的线程上跑
- 计算密集型任务:线程不要太多,如果线程开的太多,CPU来回调度反而会使程序的总体效率降低


